2017-03-21 浏览量 109
大家知道工业机器人很多时候都需要用到伺服驱动器,但是有时候会出现机器人在运行过程中发生的振动的问题,今天我们主要针对这个问题做一个实验,伺服驱动器在工业机器人上应用方案。
如何减少机器人在运行过程中发生的振动,一直是机器人用伺服系统的一个难题,这也是很多国内伺服产品无法应用到工业机器人上的一个原因。
振动主要出现在两种工况,一是机器人在启动和停止时,机器人本体和末端会发生振动;一是机器人在高速运行,并移动范围较大时,本体会出现振动和运行轨迹偏差较大的现象。引起振动的主要原因就是机器人各个关节的惯量发生了较大变化,要消除振动必须在伺服驱动器中加入各种前馈补偿控制功能。
3.2系统方案设计
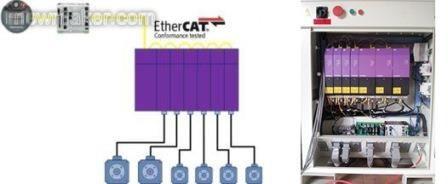
通过对客户需求的深入分析,我们为客户设计了“KEBA控制器+CoolDrive A8”伺服驱动器的电控系统解决方案。
1. 机器人专用控制系统
本次项目选择的是KEBA专为机器人行业开发的KeMotion控制系统,包括控制器、视教盒以及控制软件。其控制器和视教盒都支持EtherCAT高速工业以太网通讯,具有很高的计算性能和通讯速度。KeMotion还提供了强大的机器人控制软件,其中内置了多种类型的机器人路径规划模型,能够快速完成机器人的开发;同时软件还提供了丰富的补偿算法和插补功能,保证了机器人的控制精度。
2. CoolDrive A8高性能伺服驱动器
CoolDrive A8是国内首家通过ETG一致性测试的产品,因此能够很好同KEBA控制器进行配合;同时,CoolDrive A8内置的电流环、 速度环以及位置环的循环时间分别达到了62.5us、 125us和250us, 频率响应更是高达3KHz,充分满足工业机器人对动态响应和同步性的要求。
针对机器人的振动问题,CoolDrive A8加入了速度、加速度前馈补偿,力矩补偿等补偿算法,并开发了定位抖动消除、惯量前馈等功能,较好的解决了机器人本体在高速运行、快速定位时产生的振动。除此之外, CoolDrive A8还增加了电机弱磁控制技术以实现机器人的轻载高速运行,增加编码器信号修正技术以提高机器人的稳定性和降低运行中的噪音等。
CoolDrive A8还在国内伺服厂商中创新性的采用模块化设计。整个系统由整流模块和电机驱动模块构成,通过直流母线连接。这样的结构便于用户进行系统扩展,而且连线非常简单,直流母线还能提高系统的能源效率,使设备更加节能。CoolDrive A8还内置了STO、SS1、SS2等安全功能,在紧急情况下能够按照事先预定的规则进行安全停车,保护设备及人员的安全。
4、机器人实际性能测试
在实际测试过程中,在没有加入速度、加速度前馈补偿,力矩补偿等补偿算法的情况下,机器人在满载运行时,会发生明显振动。在机器人启动的瞬间,如果没有提前给定力矩补偿,机器人本体由于重力的作用会发生下沉的动作,也就是俗称的“点头”。而在机器人由高速运行状态快速停止时,如果没有“定位抖动消除”功能,机器人本体会由于惯性的突然变化而发生抖动。
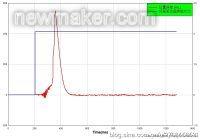
下图是没有开启补偿及振动抑制功能时,机器人的位置误差,可以看到明显的振动现象。

下图是开启补偿及振动抑制功能后,机器人本体的位置误差情况,能够非常明显的看出,机器人本体的振动得到了有效抑制。
5、结束语
安昂商城致力于为国内机器人整机厂商提供国产高端伺服系统,在性能和功能上能够满足机器人对伺服系统的要求,同时也没有国外产品高昂的价格,从而实现机器人关键零部件的国产化,降低国内机器人整机厂商的总体成本,提高国产机器人的竞争力。

雷尔达

雷尔达

雷尔达

雷尔达

雷尔达

安昂自营
安昂自营

安昂自营
安昂自营

安昂自营
移动安昂商城
手机商城:m.vipdo.cn











