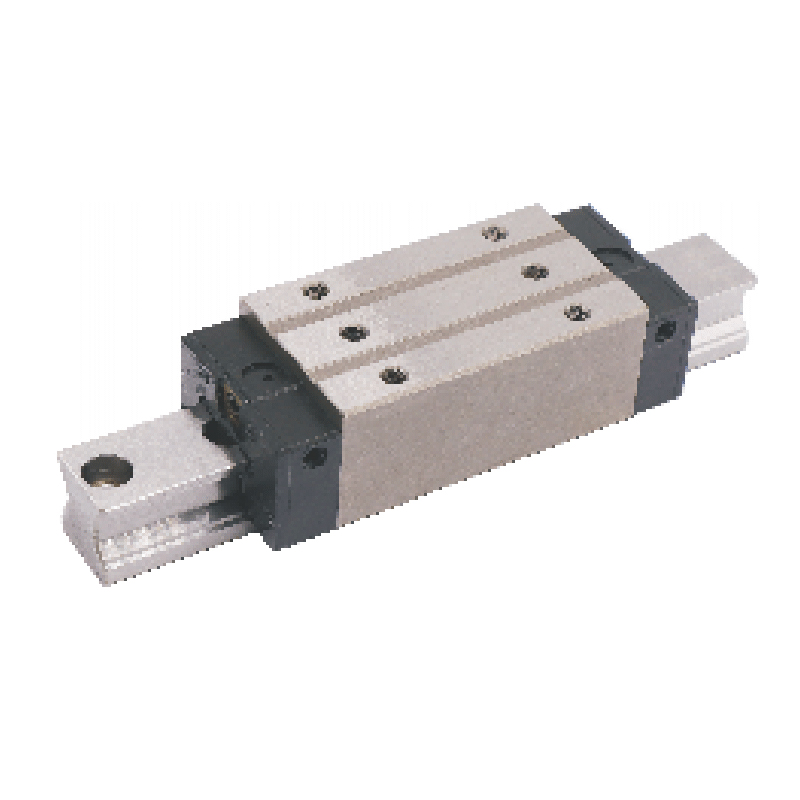
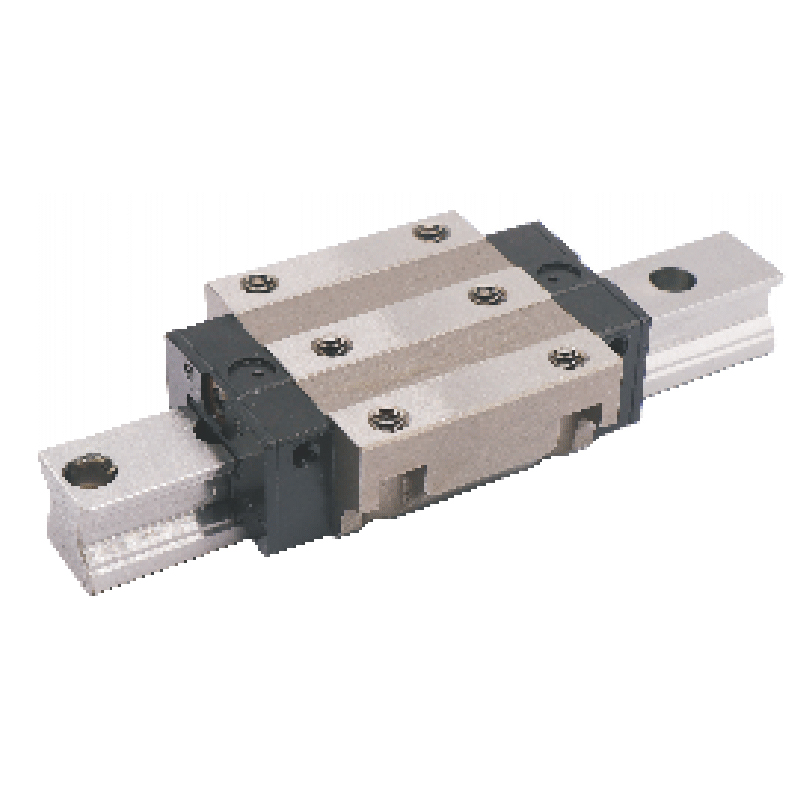
XYZ轴行走设备专用导轨
XYZ轴在数控机床的定义:
1.永远假定工件静止,刀具相对于工件移动.
2.坐标系采用右手直角笛卡尔坐标系.
大拇指(右)的方向为X轴的正方向,食指指向为Y轴的正方向,中指指向为Z轴的正方向。
在确定了X、Y、Z坐标的基础上,根据右手螺旋法则,可以很方便地确定出A、B、C三个旋转坐标的方向。
3、规定Z坐标的运动由传递切削动力的主轴决定,与主轴轴线平行的坐标轴即为Z轴,X轴为水平方向,平行于工件装夹面并与Z轴垂直.
4、规定以刀具远离工件的方向为坐标轴的正方向.
依据以上的原则,当车床为前置刀架时,X轴正向向前,指向操作者;当机床为后置刀架时,X轴正向向后,背离操作者
(注):解析“要标注X、Y和Z轴的正轴方向,就将右手背对着屏幕放置,拇指即指向X轴的正方向。伸出食指和中指,食指指向Y轴的正方向,中指所指示的方向即是Z轴的正方向”
XYZ轴行走设备专用导轨一般用在机器人上,简称:机器人行走轴
机器人行走轴是在行走轴导轨上安装一台工业机器人,使用电机驱动,具有重复定位精度高、响应速度快、运行平稳、可靠等特点,并专门设计了防尘罩,保护导轨、直线轴承以及齿条等运动部件,大大提高了可靠性和使用寿命。
XYZ轴行走设备专用导轨是一项有利于机械类的发现研究。